Workflow / Capabilities / Firmware / software process
Firmware / software engineering · process deck
Firmware / software process deck
From business analysis and requirements to design documents, implementation, virtual target testing, and real MCU/SoC integration.
Slide 01 · Route
Firmware / software workflow
Business analysis → requirements → design description → protocols → implementation → virtual target tests → real target integration.
C/C++PythonMATLABSimulinkQEMURenodeDocker
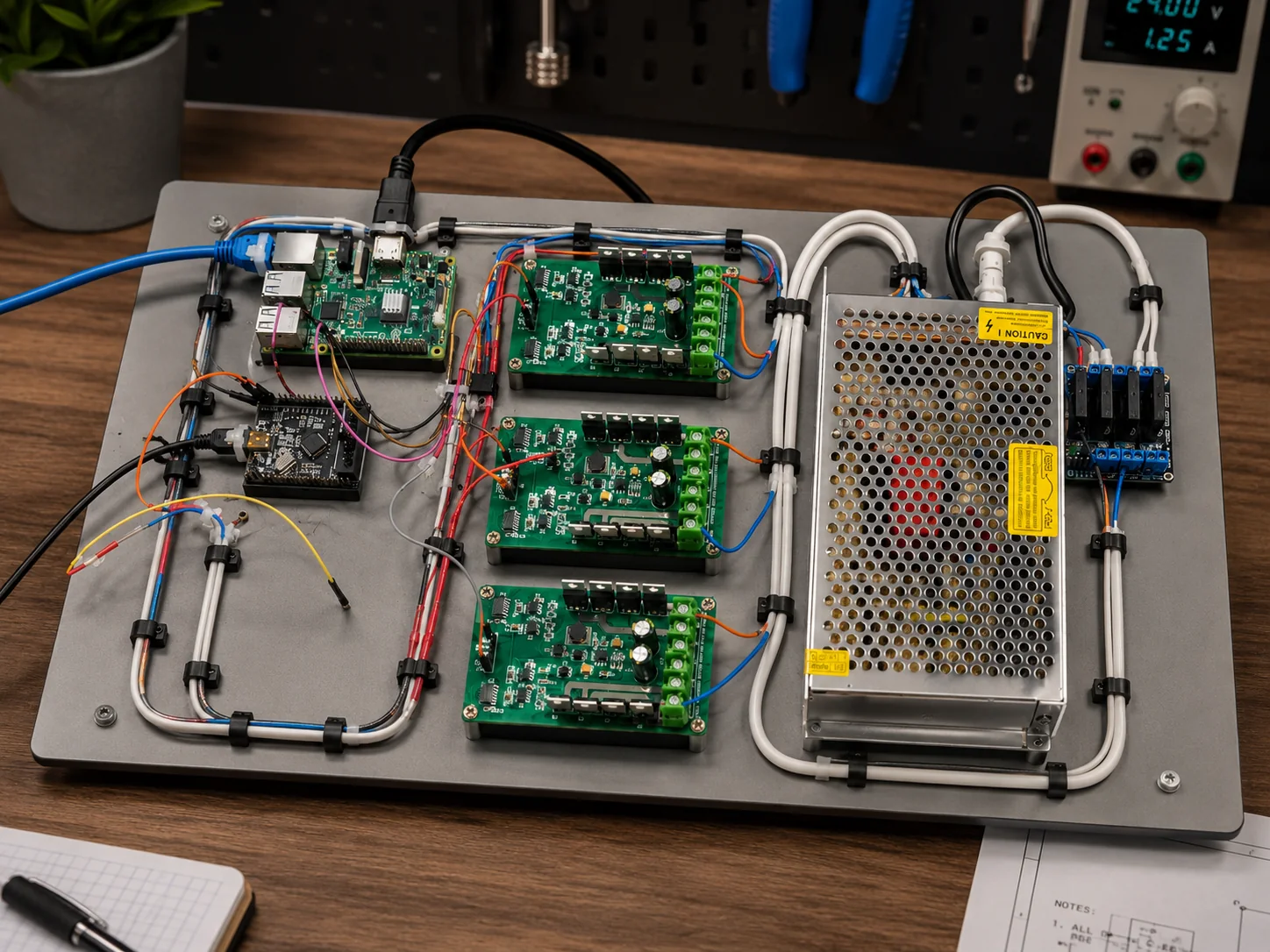 Lab evidenceEmbedded workflow on a real benchRequirements, interfaces, code, and tests stay linked to the target setup.
Lab evidenceEmbedded workflow on a real benchRequirements, interfaces, code, and tests stay linked to the target setup.
Slide 02 · Analysis
Business analysis and requirements
We can start before the client has a complete specification. We clarify the goal, constraints, interfaces, risks, and expected behavior.
Business contextUse case, operating scenario, user/system value.
RequirementsFunctions, limits, timing, target constraints, acceptance criteria.
VariantsArchitecture options, toolchain options, implementation path.
 Gate AScope is clearUse cases, constraints, interfaces, and acceptance criteria are fixed before implementation.
Gate AScope is clearUse cases, constraints, interfaces, and acceptance criteria are fixed before implementation.
Slide 03 · Documentation
Design description
Documentation is the engineering contract for implementation, review, testing, and future porting.
ArchitectureComponents, states, data flow, error handling.
InterfacesSignals, messages, units, ranges, timing.
Testing basisAcceptance criteria, test cases, expected results.
 ArtifactDesign descriptionThe document connects architecture, interfaces, expected behavior, and test evidence.
ArtifactDesign descriptionThe document connects architecture, interfaces, expected behavior, and test evidence.
Slide 04 · Documentation
Communication protocol and cooperation rules
We describe how modules communicate before code is written or generated.
ProtocolFrame format, fields, IDs, CRC, byte order, update rate.
CooperationProducer/consumer, acknowledgements, retries, faults.
TraceabilityRequirement → design item → code → test.
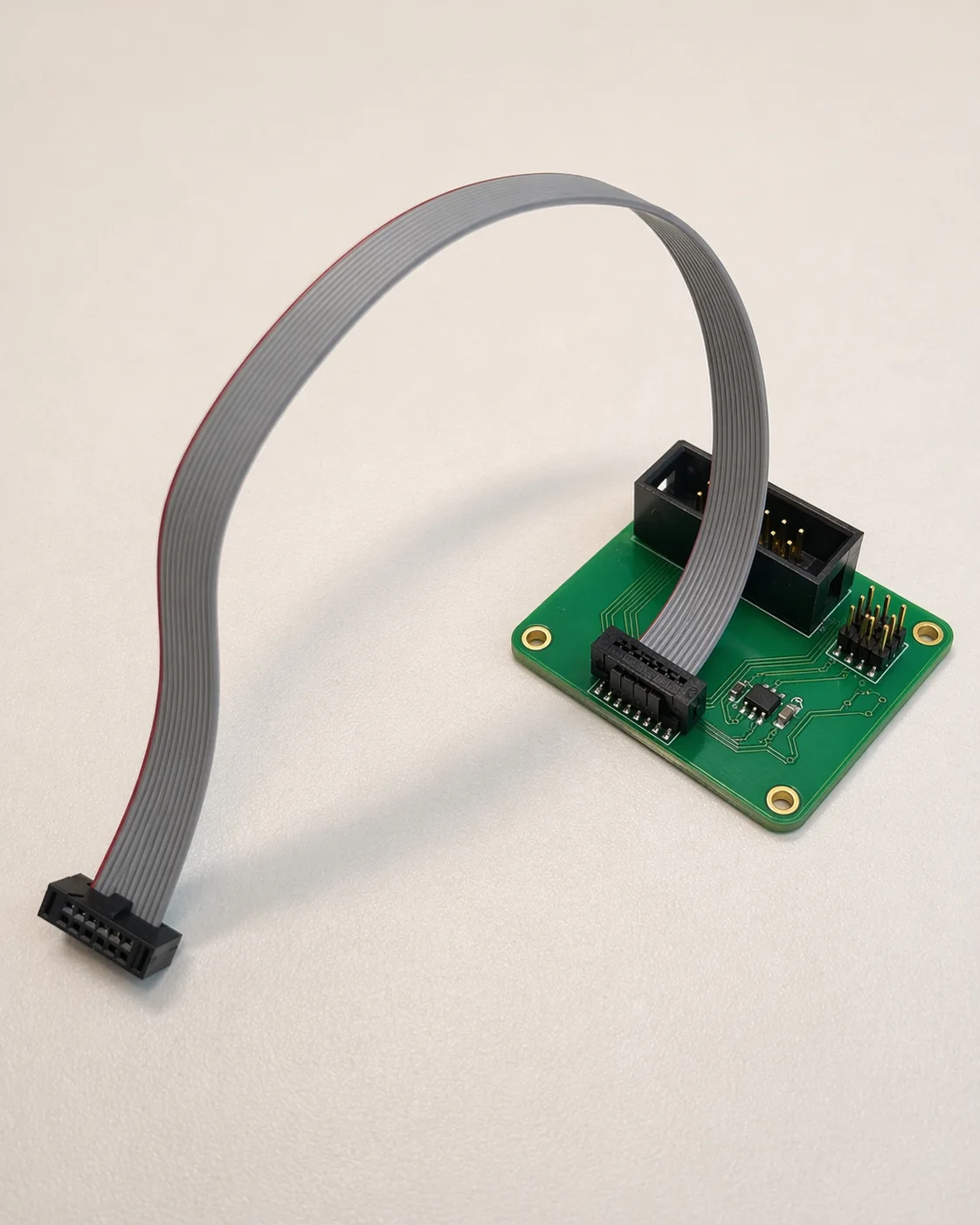 Gate BProtocol before codeFrame format, signal naming, byte order, retries, and faults are agreed before coding.
Gate BProtocol before codeFrame format, signal naming, byte order, retries, and faults are agreed before coding.
Slide 05 · Implementation
Implementation path
We select the fastest controlled route: write code manually, generate parts from documents, or use MATLAB/Simulink for portability and scaling.
- C/C++ for embedded logic, drivers, protocol handling, and target integration.
- Python for prototypes, tools, test scripts, data checks, and automation.
- AI-assisted generation for scaffolds, parsers, serializers, tests, and adapters from reviewed documents.
- MATLAB/Simulink for models, control logic, generated code, and easier adaptation across variants.
 ImplementationCode, models, tools, reviewC/C++, Python, MATLAB/Simulink, and generated artefacts are checked against the reviewed contract.
ImplementationCode, models, tools, reviewC/C++, Python, MATLAB/Simulink, and generated artefacts are checked against the reviewed contract.
Slide 06 · Test
Virtual target integration
Before real hardware, we run integration and tests in reproducible environments.
DockerRepeatable toolchain, build, scripts, and demos.
QEMUBoard-level checks and early software integration.
RenodeMCU/SoC simulation, peripherals, and multi-node scenarios.
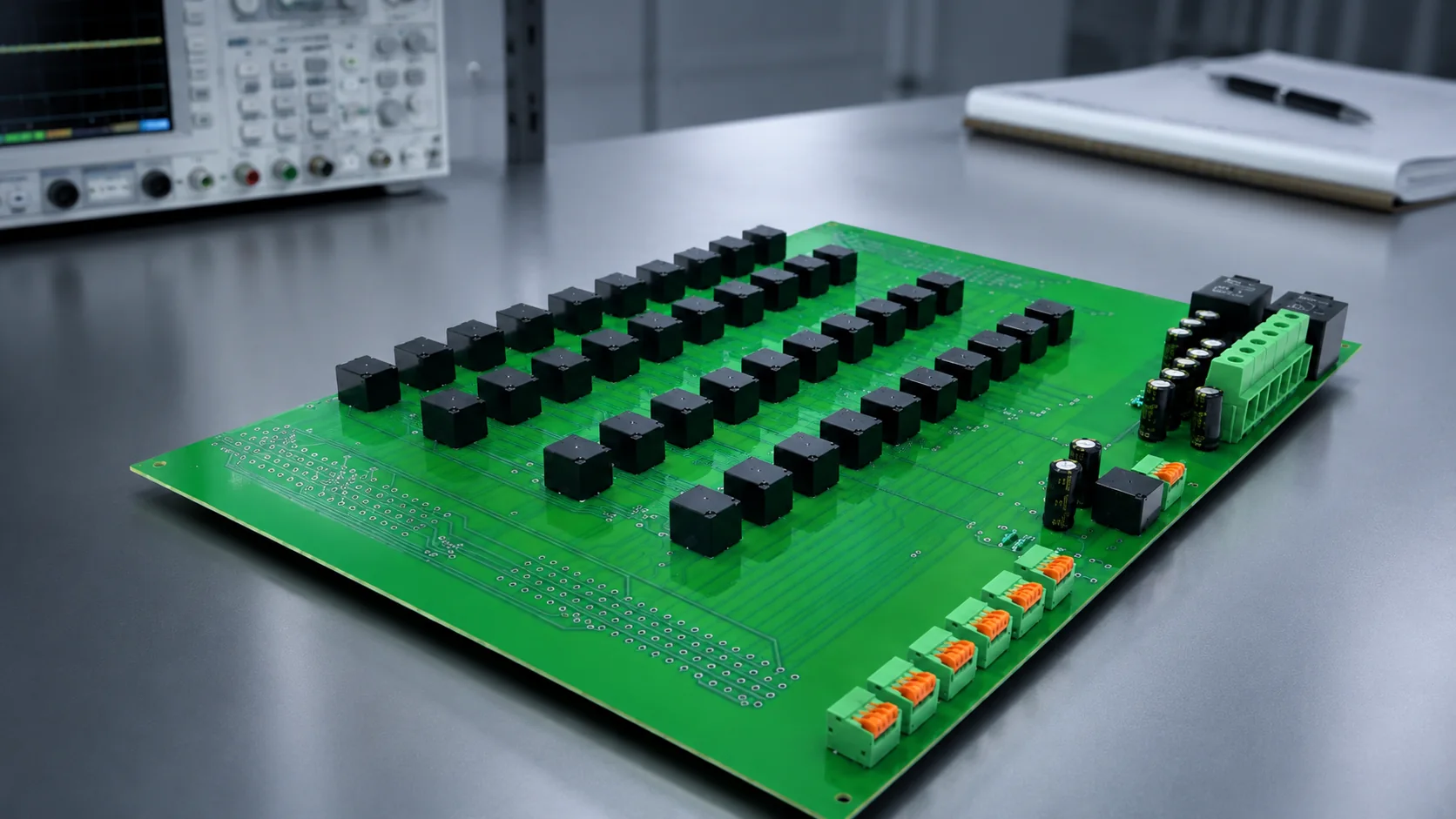
 Virtual-firstRepeatable integration loopDocker/QEMU/Renode checks reduce risk before the real target blocks the schedule.
Virtual-firstRepeatable integration loopDocker/QEMU/Renode checks reduce risk before the real target blocks the schedule.
Slide 07 · Target
Real MCU / SoC integration and handover
After virtual fixes, we move to the real target and close the hardware-firmware loop.
Bring-upBuild, flash, debug, logging, diagnostics.
HW/FW testsProtocol, timing, stability, fault handling, regression.
HandoverCode, models, Docker setup, design docs, test evidence.
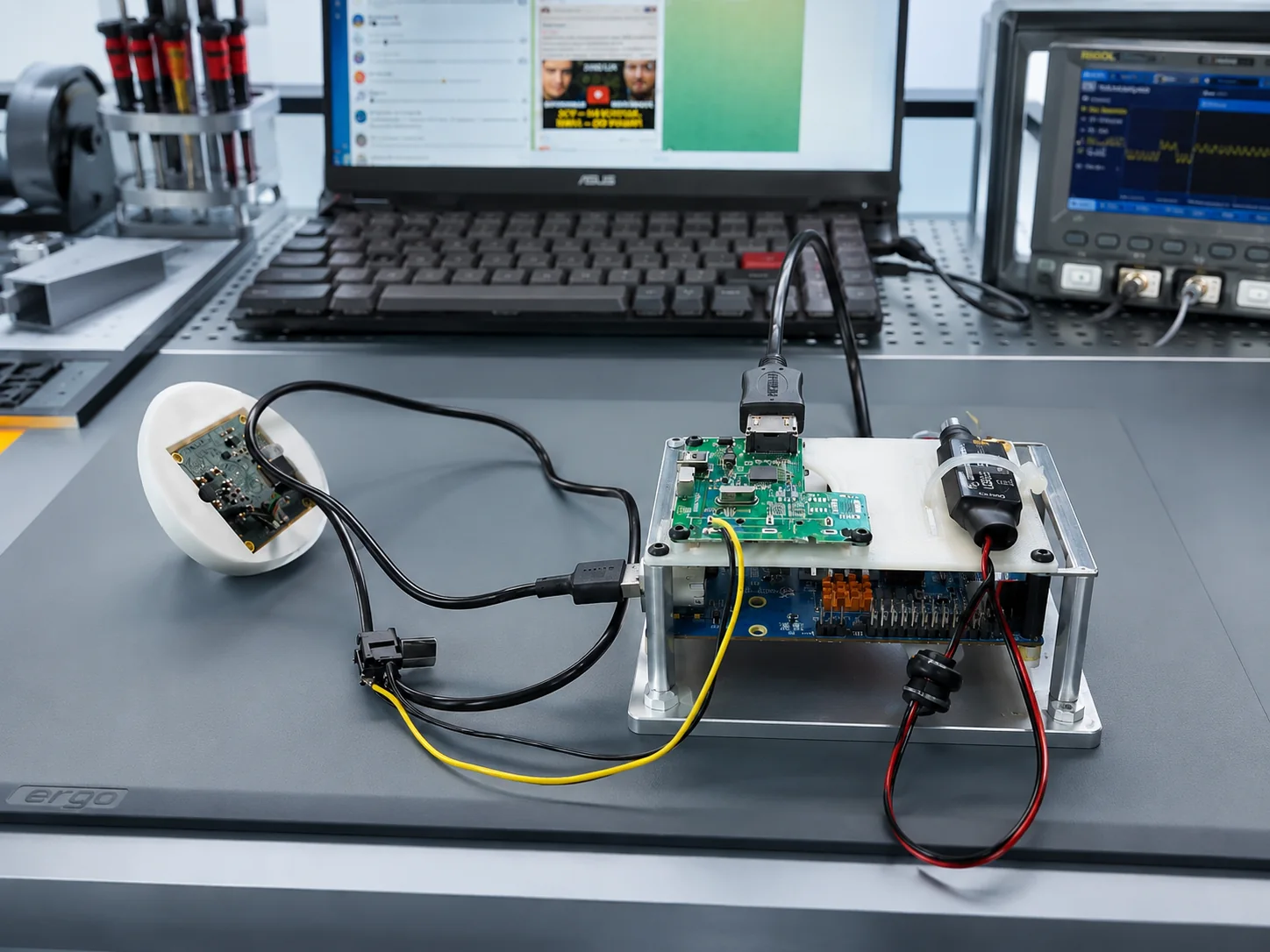
 Gate CReady for client reviewRunnability, logs, test evidence, source code, models, and handover package are aligned.
Gate CReady for client reviewRunnability, logs, test evidence, source code, models, and handover package are aligned.
Contact
Send a short firmware / software context
Useful inputs: business goal, target hardware, existing requirements, protocols, signal/interface tables, timing limits, models/code, logs, and expected behavior.
solution@contimech.org